Command Receiver¶
This component is the one receiving the commands from the TMA and triggering the corresponding state machines for each of them. This is done using the TCP server component.
This component also will reject any command that are not sent from the actual commander, and manage the actual commander logic.
The commander clock (it is a command actually) is also checked in this component and if clocks timeouts, then it will trigger all state machines subscribed to fault, unless those state machines are configured as not fault when subscribed.
All the elements of the component are in the TCPCMDReceiver.lvlib, except the dependency of TCP server component.
TCPCMDReceiver.lvlib¶
The command is received using TCP server and the vis on this library will parse it, process and send to state machines if necessary.
All the commands are received by the TCP task that will produce an user event in the TCPCMDReceiver. This library will parse the command, and send to the subsystem if it is subscribed. There are two commands that are process directly by this module (clock and SetCommander).
The TCPCMDReceiver manages also the actual commander and the watchdog for the commander.
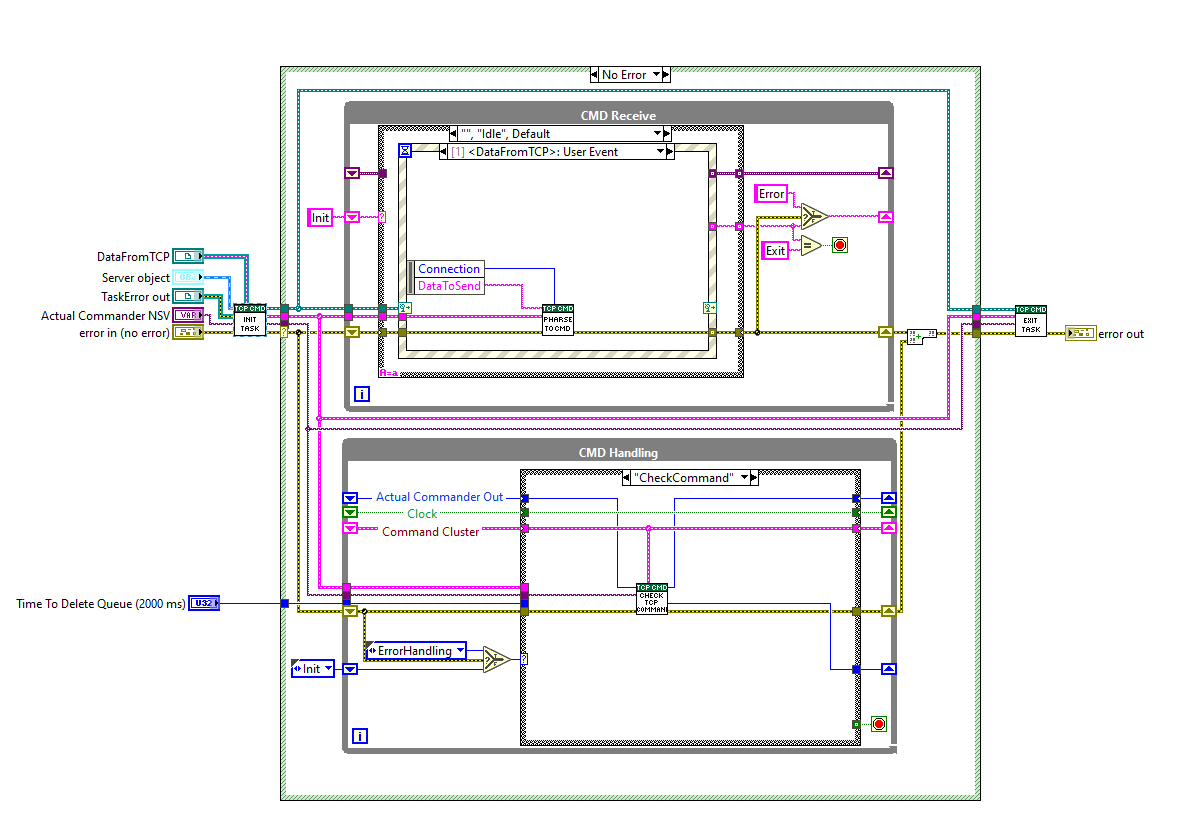
Task¶
The task has two loops. The first one is a state machine where the idle state is for receiving commands from tcp or from local machine (configuration, subscribe, unsubscribe and exit commands). All the commands are user events. If the received command is from tcp it will be server to the other loop (consumer loop) using a queue.
When a subsystem is subscribed it is stored in a DVR of arrays for all subscribed subsystems.
The consumer loop will deal with tcp commands. This loop is also a state machine where the dequeue of the queue is done GetCMDData state. Other states are to process the command, init, exit and error handling.
There are two commands processed locally:
The clock command. It will reset the watchdog. If the watchdog time is overcome then the subscribed subsystem will faulted and the commander will be reset to “not configured”
The SetCommander command. It will change the actual commander. This transition is not allowed if the commander is the HHD and the command is not from the HHD.
Public methods¶
In this section the public methods and their usage is explained
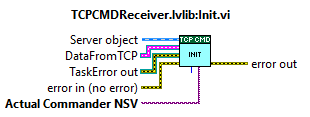
Init¶
Calling this VI will launch the task to receive the command via tcp. This vi needs
Server object: A tcp server object already initialized as input.
DataFromTCP: The user events reference DataFromTCp the initialization of the tcp server are inputs.
TaskError: The user events reference DataFromTCp the initialization of the tcp server are inputs.
Actual Commander NSV: The reference of the Actual commander variables is also needed to publish the actual commander.
Time To Delete Queue: An optional input for time to delete queues. If there is no response from the statechart the task will flush the queue after this time, this way the statechart will accept new commands. If the time is fulfilled a warning is publish. The default value for this optional inputs is 2000ms.
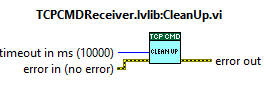
CleanUp¶
This Vi will close the task and all the elements created by the library. The tcp server must be clean up separately.
SubscribeSubsystem¶
Calling this vi, the a subsystem is subscribed to receive commands. If a subsystem is subscribed commands received by the command receiver task can be redirected to this subsystem, otherwise the commands will be rejected by the command receiver task. If the subscription is not possible the error -66000 will be put in the error output. This vi has only one input that is a structure with the next fields.
Subsystem Name: Name to identify the subsystem
Minimum Command: Minimum command of the set of commands attended by the subscribing subsystem
Maximum Command: Maximum command of the set of commands attended by the subscribing subsystem
CommandObjects: Array of CMDManagement objects. There is an object per subsystem instance.
Send Faults: If True (default) a fault will be sent to the subsystem if the commander watchdog is triggered
UnsubscribeSubsystem¶
Calling this VI a subscribed subsystem can be unsubscribe to stop receiving commands from the command reception task. If the unsubscribing is not possible the error -66000 will be put in the error output. This vi only needs the identification of the subscribed subsystem
Subsystem name: Name that identified the subsystem when subscribed.
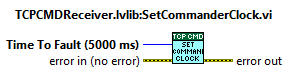
SeCommanderClock¶
This VI allows to change the default 5000 ms time for the commander watchdog
Time To Fault: Watchdog time in ms. If the elapsed time between two clock commands from the commander is bigger than this time a fault will be triggered in all subscribed subsystem with this option active